子午線越えをすると赤緯側の補正動作が逆になり、オートガイドが不良になる問題に悩んでおりましたが、ようやく解決しました。その対処方法を紹介します。
解決にあたり、ASCOM Telescope Driver for NS-5000の製作者である星羊翁様とNS企画の西岡様に多くのアドバイスをいただきました。ありがとうございました。 ここに記述することは、理解不足による間違いがあるかもしれません。ご指摘等ありましたら連絡いただけると幸いです。
【過去記事】
・機材紹介:NS-5000
・私のやり方:NS企画 NS-5000の使い方~ASCOM接続~(不具合解決前のやり方)
対処方法は以下の2点です。
ご参考に私の環境を記述しておきます。環境が異なると症状や対処方法が異なることがあると思います。
| OS | Windows 10 Pro 22H2 |
| ASCOM Platform | 6.4 SP1 -6.4.1.2695 |
| ASCOM Driver | ASCOM Telescope Driver for NS-5000 Ver1.01 |
| NS-5000ファーム | Ver.6.30 |
以下1.~4.の手順は、
私のやり方:NS企画 NS-5000の使い方~ASCOM接続~
で説明しています。
ここでは、対処方法になった「5.ASCOMの接続(Generic Hubで接続)」以降の運用手順を説明します。
1.PCとの接続
2.NS-5000の初期設定(初回のみ)
3.日時送信
4.ASCOMの初期設定(初回のみ)→以下の5.の手順でASCOMの設定ボタンをクリックすることで設定できます。
PHD2やN.I.N.A.やステラナビゲータなどASCOM接続できるソフトを起動します。
(ここではN.I.N.A.で説明します。どのソフトから接続しても構いません。)
「接続」→「望遠鏡」を選択します。
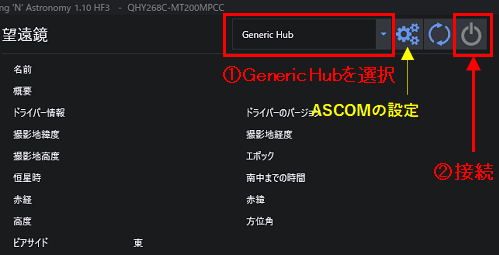
こちらの画面で、
①「Generic Hub」を選択します。
②「接続」ボタンをクリックします。

接続に成功すると、NS-5000の制御画面が開きます。
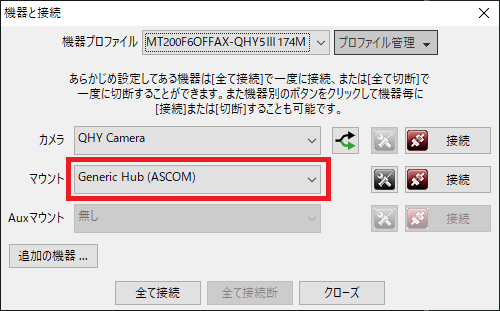
PHD2をGeneric Hubで赤道儀に接続します。
(その他、ステラナビゲータなど使用したいソフトも全てGeneric Hubで赤道儀に接続して下さい。)
POTH HubやGeneric Hub、Device Hubといった○○Hubというソフト(ドライバ)は、複数のソフトから同一のハードウエアへASCOMで接続することを仲立ちします。 ASCOM接続ではハードウエア⇔ソフトは1対1でしか通信できませんが、 ○○HubというソフトがハードウエアとASCOMで接続(通信)し、N.I.N.A.やPHD2といったソフトは○○Hubと接続(通信)するイメージで、複数のソフトから同一ハードウエアへの接続を実現しています。
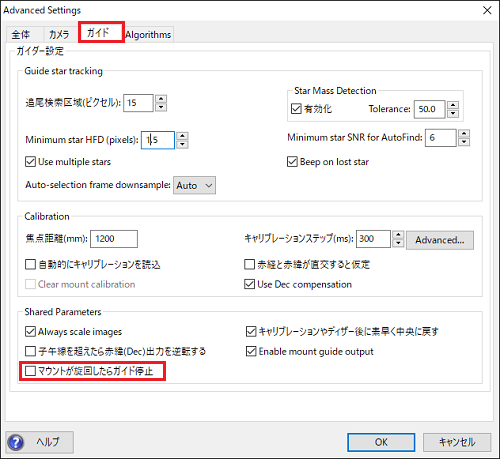
PHD2の設定画面を開いて「ガイド」タブを開きます。
「Stop guiding when mount slews」(日本語では「マウントが旋回したらガイド停止」のチェックを外します。
ここまでが操作説明です。
この不具合はオートガイドで生じますが、日中に室内で現象確認をすることが出来ました。
ここでは調査で得た事実と私の推論が入り混じっています。推論部は この色で表示してあります。
ドイツ式赤道儀では、鏡筒が赤道儀に対して東側にあるか西側にあるかで、北方向へ鏡筒を向ける際の赤緯モータの回転方向は逆になります。
そのため、鏡筒がどちらにあるかを把握してモータを動作させなければいけません。NS-5000を含め、ほとんどのモータドライブでは、そのコントローラで鏡筒が東西のどちらにあるかを把握してモータの回転方向を決めるようです(W-ZEUSは違っていて全てPC側で管理されているようです)。
NS-5000では観測地情報(緯度、経度)と日時から地方恒星時を計算することで子午線を確認して、鏡筒が東西のどちらにあるかを判断しています。 具体的には、鏡筒が向いている方向が子午線より東なら鏡筒は西側に、向いている方向が子午線より西なら鏡筒は東側にあると判断しているようです。
このように、コントローラが常に鏡筒が東西のどちらにあるかを判断して、PCからの導入指令に対して赤緯モータをどちらに回転させるのか、鏡筒の東西反転動作をするのかを決めて赤経、赤緯モータを制御しています。
ただし、恒星時駆動で子午線を東から西に超えた場合は、鏡筒が西側のまま変わっていないことを認識していて、オートガイドの指令で不具合は生じないようになっています。
ASCOM Telescope Driver for NS-5000では、鏡筒の東西方向を固定する機能を実現するため、 ドライバが側でも鏡筒が東西どちらにあるかを記録しており、この記録とNS-5000の判断(ドライバ側での子午線演算による推定)との違いを比較して、赤緯モータを逆に回す操作をしているのだと思います。 ただし、オートガイド中に移動関係のコマンドが出ることはないと仮定して、移動関係のコマンドが出るまでモータの逆転操作を保留することで、ガイド中にモータの逆転が行なわれないよう設計されているようです。
しかし、POTH Hubではガイド中の指令もSlewingコマンド(移動関係のコマンド)が送られているようで、これにより子午線を超えると赤緯モータが逆に動く不具合が生じていました。一方でGeneric Hubではガイド中の指令ではSlewingコマンドは送られないためこの不具合が生じなくなります。 ただし、PHD2で「Stop guiding when mount slews」のチェックが入っているとSlewwingコマンドが送られるため、このチェックを外しておかないと赤緯モータが逆に動く不具合が生じてしまいます。
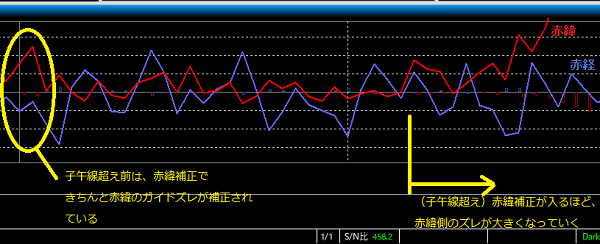
オートガイドで赤緯モータが逆に回る事象を解消することができましたが、一連の動作検証の中で新たな不具合事象に気づきました。
| ・NS-5000ドライバの設定: | 鏡筒の東西固定をON |
| ・鏡筒の東西位置: | 西側 |
ピンクで塗りつぶした部分が異常な動作(不具合現象)になります。
Generic Hubではこの異常を解消するには、一旦、NS-5000の電源を切断して再接続することが必要になりました。
| 操作・事象 | Generic Hubでの接続時 | Poth Hubでの接続時 |
|---|---|---|
| ステラナビゲータで東天の星を選択して鏡筒西側で同期指令 | - | - |
| (東天を向いている状態で)ステラナビゲータで現在位置より北側の星を選択して導入指令 | 赤緯体は北へ回転転(上から見て左回り) | 同左 |
| ステラナビゲータで西天の天体を選択して導入指令 | 鏡筒の向きは西へ(東西反転なし)動き、導入を完了する この時、赤緯体の動きもあっている |
同左 |
| (西天を向いている状態で)ステラナビゲータで現在位置より北側の星を選択して導入指令 | 赤緯体は北へ回転転(上から見て左回り) | 同左 |
| ステラナビゲータで南中直前の東天の星を導入指令し、そのまま恒星駆動で南中越えを待つ | - | - |
| (南中超えした後)ステラナビゲータで東天の星を選択して導入指令 | 確認画面は表示されず、赤経体が西方向へ動き始める(東西反転をする動作) ◆鏡筒の東西を固定するよう設定しているため、異常な同左 |
同左(異常動作) |
| ステラナビゲータで停止ボタンをクリック | 導入動作が停止する | 同左 |
| もう一度、ステラナビゲータで東天の星を選択して導入指令 | 先ほどとは異なり、今度は正常に赤経体が東方向へ動いて(東西反転なし)、導入を完了する この時、赤緯体の動きも合っている | 同左 |
| もう一度、ステラナビゲータで東天の導入した天体より少し北の天体を選択して導入指令 | 赤緯体は北へ回転(上から見て左回り) | 同左 |
| ステラナビゲータで西天の天体を選択して導入指令 | 赤経体は西方向へ動き(東西反転なし)導入を完了する。この時、赤緯体の動きもあっている。 | 同左 |
| ステラナビゲータで西天の導入した天体より少し北の天体を選択して導入指令 | 赤緯体は南へ回転(上からみて右回り) ◆赤緯体が指令と逆に動作してしまい、異常な動作 |
赤緯体は北へ回転(上からみて左回り)で正常に動作 |
このように南中超えをした後で、東天の星を選択して導入指令することは、私の運用(一晩あたり、一天体のみを撮影する)では、ほぼ実施することがない操作のため、実用上の弊害はなく、この不具合は放置しようと思っています。
![]()
![]()