年末に撮影用のPCを更新しファーストライトを行いました。
その時に、「ん?」となった出来事を紹介します。
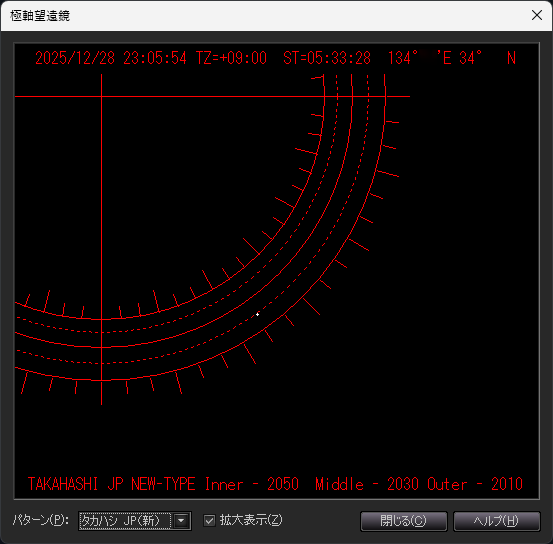
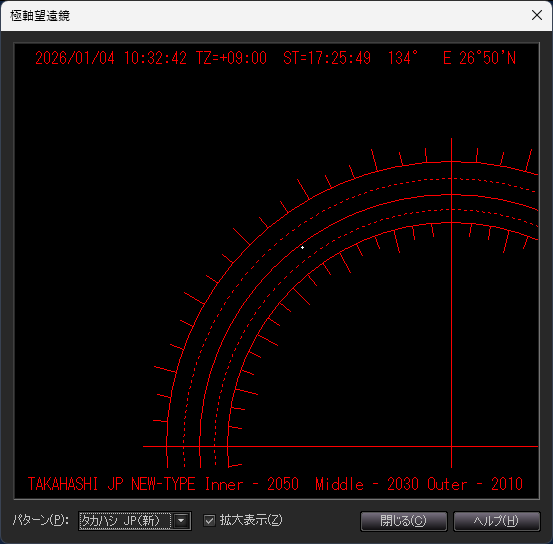
ステラナビゲータ12の極軸望遠鏡表示です。
タカハシNJP用の新パターンで、最も内側の線が2050年、外側の線が2010年で、間の線が2020年、2030年、2040年を示しています。
いつもは2020年線と2030年線の間に表示されていた北極星が2020年線に重なっていました。
あれ、いつもと違う!
設定間違えたのかと場所、時刻などを調べましたが間違いは見つからず…
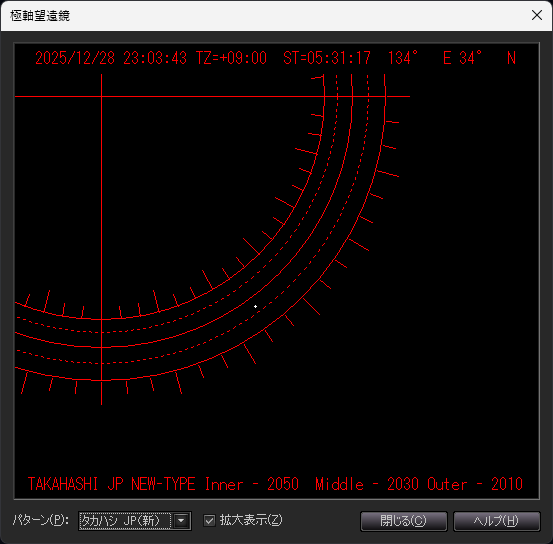
自宅で使用しているデスクトップPCのステラナビゲータ12で確認してみたところ、このように従来通り2020年線と2030年線の間に表示されました。
次にインストールされているステラナビゲータのバージョンを確認したところ、従来通りの表示をしたPCでは12h、新しく準備したPCは12iでした。
これがあやしそうです。
デスクトップPCのステラナビゲータへ12iのアップデータを適用したところ、2020年線に重なる表示に変わりました。
バグじゃん
いまさらこんなレガシー機能でバグ出る?って思いながら、アストロアーツへ問い合わせを送りました。
新しいノートPCにステラナビゲータ12をインストール、観測→極軸望遠鏡を選ぶと、北極星の位置ば微妙に違う。いろいろやってみたけど、原因不明です。
— 宙ねこ (@sora5tm) December 28, 2025
1枚目が正しい表示(これまでのPC)、2枚目が間違った表示(新しいPC) pic.twitter.com/k0DpAabONs
さて、困った時はSNSへ…と思い投稿していたXのポストに、boso-wareさんからコメントが入りました。
12iのリリースノートにある「極軸望遠鏡ダイアログに表示される北極星の位置が大気差補正されていない問題を修正」ではないか?とのことです。
確かに、そうかも
従来通り、2020年線と2030年線の間に表示されました。 これで大気差補正機能追加による事象であることが判明しました。
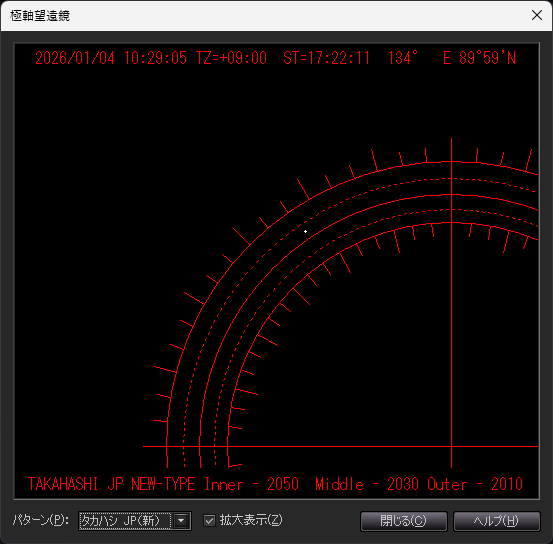
北緯90度での表示に対し、北極星の位置がすごし下がり2030年線に重なって表示されました。
NJPであれば調整できる程度の違いで、印象としては大きいです。
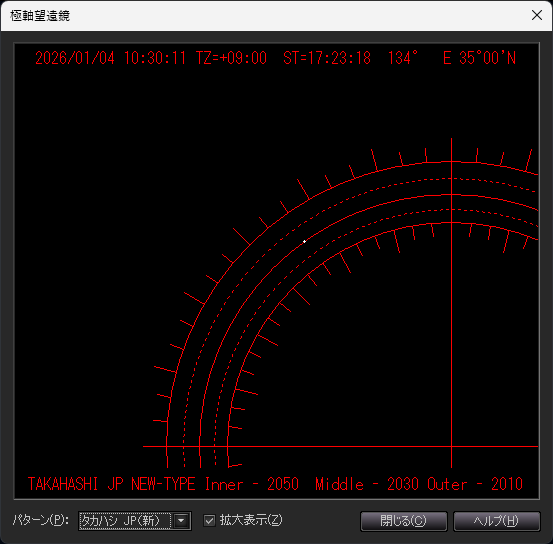
日本で使用される南端付近ではどうなのかも調べてみました。
35度付近よりわかる程度の違いがでました。
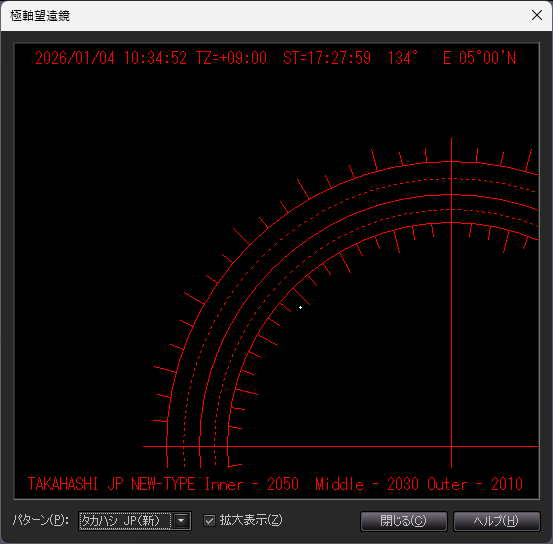
北極星の表示は大きく下にズレて2050年線より内側に表示されました。
そうか、大気の屈折でこんなに浮き上がるのね。
これまで北緯35度付近での使用において大気差補正をしないで使ってきて、特に問題を感じなかったということから状況証拠的には、このくらいの緯度では大気差補正考慮は不要と言えそうです。
ただ、NJPの極軸調整機構の出来栄えは素晴らしく、例えば35度付近と26.5度付近の北極星の位置の違いであれば、簡単に調整できるレベルです。趣味ですからね、こういったところはこだわりたいところです。
そこで、大気差補正をする必要があるかどうかについて、考察してみました。
さて、大気差補正量がどの程度かですが、以下の条件で算出しました。
計算式は R≒58.2"・tan Z です。
| ・気圧: | 1013hpa |
| ・気温: | 10℃ |
| ・湿度: | 影響が小さいため無視 |
| 緯度Φ(°) | 天頂距離Z(°) | 大気差補正量R(arcsec) |
|---|---|---|
| 35° | 55° | 83" |
| 26.5°(沖縄付近) | 63.5° | 116" |
| 15°(フィリピン北部ルソン島付近) | 75° | 217" |
| 10°(フィリピン南部ミンダナオ島付近) | 80° | 330" |
まずはオートガイドを前提として赤経、赤緯の並進ズレについては補正可能のため考慮せず、視野回転によるズレの影響について考察してみました。
視野回転を算出する近似式は以下のようになります。
(近似条件は、子午線付近、極軸ズレは数分以内、露光時間は600秒程度まで)
θ≒ω・ε・t・sinΦ
| θ(rad): | 視野回転角度 | 算出する値 |
|---|---|---|
| ω(rad/sec): | 地球時点角速度(rad/sec) | 7.292×10^−5(rad/s) |
| ε(rad): | 極軸ズレ | 設定する値 |
| t(sec): | 露光時間 | 設定する値 |
| Φ(rad): | 観測地緯度 | 今回は35度(sinΦ=0.574) |
視野回転による素子上でのズレ量ΔS(mm)は以下の式で表されます。
ΔS(mm)=r・θ
さて、今回、私の機材を前提に検討してみました。
| ・鏡筒: | MT-200(f=1,200mm) |
|---|---|
| ・カメラ: |
QHY268M ・素子サイズ:APS-C(23.5mm×15.7mm) →rは長辺方向の半分として11.75mmを用いました ・画素サイズ:3.76μm/px |
300sec露光での計算結果は以下のようになりました。
| 極軸ズレε | 視野回転角θ(rad) | 像移動量ΔS(μm) | 像移動量ΔS(px) |
|---|---|---|---|
| 10" | 6.09E-7 | 0.0072 | 0.0019 |
| 30" | 1.83E-6 | 0.022 | 0.0057 |
| 60" | 3.66E-6 | 0.043 | 0.011 |
| 120" | 7.30E-6 | 0.086 | 0.023 |
| 300” | 1.83E-4 | 0.214 | 0.057 |
この結果から日本付近ではまったく考慮不要と言えます。それどころか、300"近くずれてもまったく問題ないという結果になりました。
仮に15分露光であればΔSは3倍になりますが、日本付近(大気差補正83"、オレンジ色で示したあたり)では影響がでる量ではありません。
オートガイドしているとはいえ、赤緯補正が少ないにこしたことはありません。
どの程度の赤緯補正が必要になるかという点から検討してみました。
極軸ズレε(rad)による赤緯方向のドリフト速度δDEC(rad/sec)は以下の近似式で表されます。
(子午線付近、極軸ズレは数分以内、露光時間は600秒程度まで)
δDEC=ω・ε・sinΦ
(近似式としては視野回転と同一)
| 極軸ズレε | 赤緯ドリフト速度δDEC(”/sec) | 赤緯ドリフト速度δDEC(px/sec) |
|---|---|---|
| 10" | 4.2E-4 | 0.00065 |
| 30" | 1.3E-3 | 0.0019 |
| 60" | 2.5E-3 | 0.0039 |
| 120" | 5.0E-3 | 0.0078 |
| 300' | 1.3E-2 | 0.019 |
PHD2のガイドで赤緯ドリフト量がどの程度許容されるかについてChatGPTに問いかけてみたところ、以下のような情報を示してくれました。
この判断基準に照らし合わせると、日本付近での大気差補正量程度のズレであればオートガイドに影響を与えることもなさそうです。
| 赤緯ズレ角速度 (px/sec) | 評価 | 定量的な意味 |
|---|---|---|
| ≦ 0.01 | 無視できる | 1〜2秒露光で ≦0.02 px。PHD2の重心検出ノイズ・シーイングに埋もれる |
| 0.01〜0.02 | 良好 | 補正は稀。DECはほぼ静止扱い、片効き設定が安定 |
| 0.02〜0.05 | 実用 | 毎フレーム補正が入り始めるが、バックラッシュ未到達で制御可能 |
| >0.05 | 不安定 | 数秒でバックラッシュ量に達し、DECハンチングが発生しやすい |
今回の考察を経た私なりの結論。
日本付近であれば、大気差補正をする/しないは大差なく、無理にする必要はない。
ただ、ガイドエラーは極軸エラーだけでなく他、様々な影響が積み上がって起こることなので、一つ一つの要因はできるだけ抑えておくほうが良く、大気差補正について無理なく調整できるのであればしておくほうがベターであると結論づけることにします。
趣味ですからね、労力をかけたい部分はかける、省きたい部分は省く、その意味を知りたければ知る、そうでなければ忘れる…というところです。
![]()
![]()