ここでは、望遠鏡(赤道儀)の同期のためのプレートソルビングのやり方を説明します。
N.I.N.A.のバージョンは1.10HF3 Release、OSはWindows10Pro 64bitを対象に記述しております。
プレートソルビングを行う際に、望遠鏡(赤道儀)が認識している方向とプレートソルビング用の撮影を行った方向がまったく無関係であっても私の実施環境ではプレートソルビングは成功しました。
ただ、ある程度方向があっている方がプレートソルビングの計算時間が早くなりますので、ステラナビゲータなどのソフトを使って大まかに望遠鏡が向いている方向を同期しておいて下さい。
(繰り返しになりますが、この手順を飛ばしてもプレートソルビングは成功すると思います)
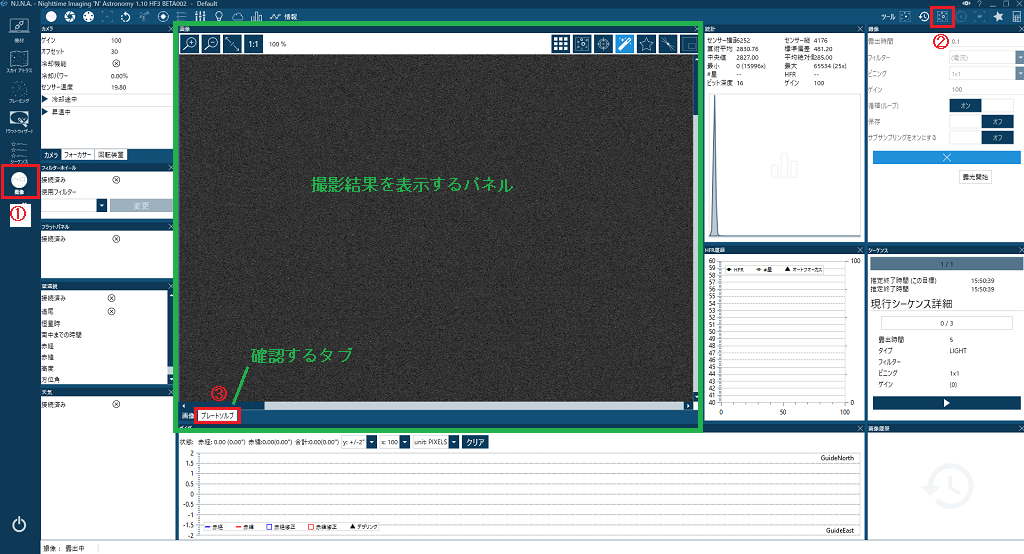
①撮像をクリックして、メイン画面を撮像の画面にします。
中央の撮像結果を表示するパネルの左下あたりに「プレートソルブ」のタブが表示されているかを確認して下さい。もし表示されていなければ、②プレートソルブをクリックします。このボタンはクリックする都度、プレートソルブのタブの表示/非表示を切り換えます(②のボタンにマウスオンするとプレートソルブと表示されます)。
③表示したプレートソルブのタブをクリックします。
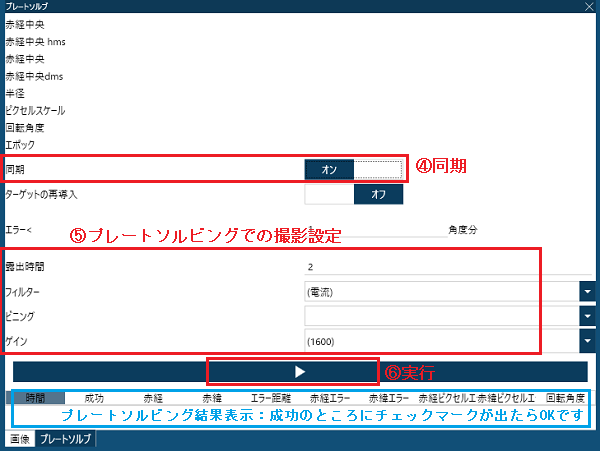
画面中央のパネルが左図の表示に変わります。
④同期の設定を「オン」にして下さい(一度設定すると次回以降はオンのまま残ります)。
プレートソルビングする画像を撮影済の場合は、以下を飛ばして、⑦をクリックする手順に進んで下さい。
この画面から新たにプレートソルビングする画像を撮影することもできます。
その場合は、⑤の撮影設定(露出時間やゲインなど)を設定して下さい。星がある程度写ればいいので、数秒程度の露出で大丈夫です。
次に、⑥プレートソルビングの実行ボタンをクリックして下さい。
撮影が行われた後、続けてプレートソルビングが実行されます。
上記手順で、⑥まで実行した場合は、ここの操作は飛ばして下さい。
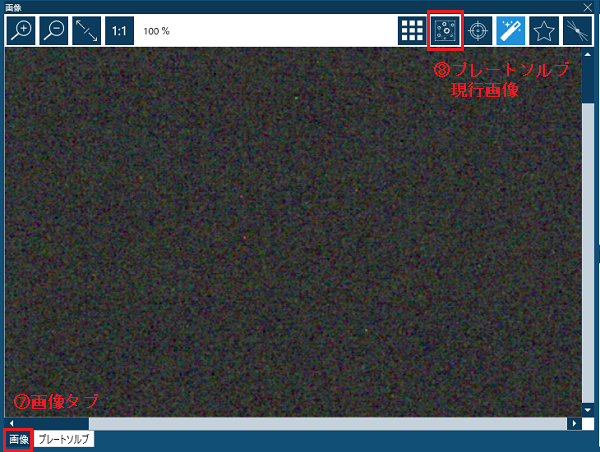
ここでは、1枚撮影で画像を取得した後プレートソルビングする手順を説明します。
⑦画像タブをクリックして撮影済の画像を表示します。次に、撮影画像右上の⑧プレートソルブ現行画像ボタンをクリックして下さい。
(上記の⑥と違って)新たな撮影は行わずに撮影済の画像に対してプレートソルビングが実行されます。
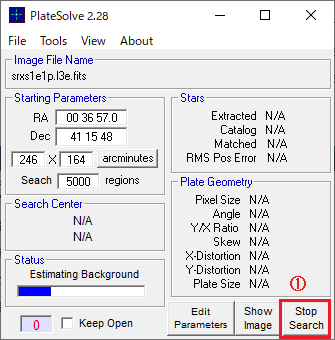
まずプレートソルバーに設定したプレートソルビングソフトが実行されます。
設定のところで説明したように、プレートソルバーにはPlateSolve2を設定しましたので、左図のPlateSolve2が起動し、位置計算を始めます。
このソフトはある程度方向が定まっていないと位置同定が成功しません。しばらくまっても計算が終わらないようであれば、①Stop Searchをクリックして動作を止めて下さい。
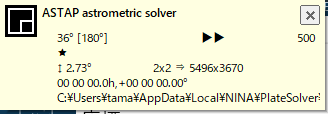
上記の手順でプレートソルバー(PlateSolve2)を停止させた場合は、ブラインドソルバーに設定したASTAPが起動します。
このソフトは方向がまったくわかっていなくても位置同定に成功しますので、計算が終わるまで待って下さい。
NINAでプレートソルビングによる同期が行われるとステラナビゲータでも現在の鏡筒の方向を示す赤十字線の位置が正しく更新されています。
ステラナビゲータの画面で、正しい向きに向いているかを確認してみて下さい。
明るい恒星などを選択して導入動作をしてみると、同期の確認がわかりやすいと思います。
赤道儀の自動導入は極軸ズレなどの影響で、導入の都度少し位置がズレます。ですので、導入の都度プレートソルビングを実行するとそのズレ分を補正することができます。
![]()
![]()